04-多层感知机
4.1 多层感知机
多层感知机概念
将许多全连接层堆叠在一起,每一层都输出到上面的层,直到生成最后的输出。这种架构通常称为多层感知机,通常缩写为MLP。
为了发挥多层架构的潜力,需要: 在仿射变换之后对每个隐藏单元应用非线性的激活函数,如下:
激活函数
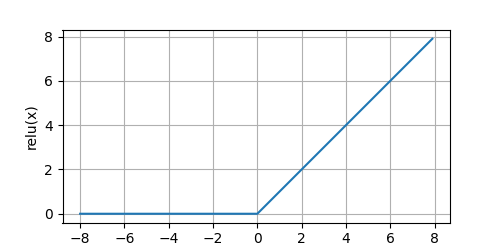
ReLU函数:

使用实例:
1
2
3
4
5
# ReLU函数
x = torch.arange(-8.0, 8.0, 0.1, requires_grad=True)
y = torch.relu(x)
d2l.plot(x.detach(), y.detach(), 'x', 'relu(x)', figsize=(5, 2.5))
d2l.plt.show()
1
2
3
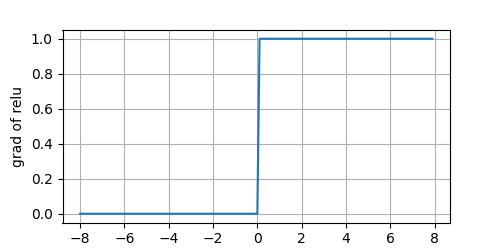
y.backward(torch.ones_like(x), retain_graph=True) # 保留计算图,在后续反向传播中继续使用这个图
d2l.plot(x.detach(), x.grad, 'x', 'grad of relu', figsize=(5, 2.5))
d2l.plt.show()
ReLU函数及其导数图像:
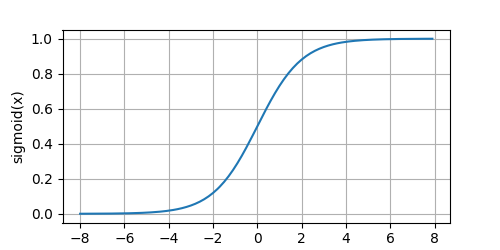
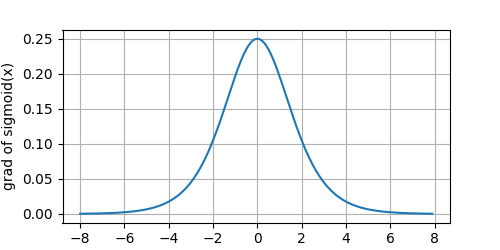
sigmoid函数:

函数及其导数图像:
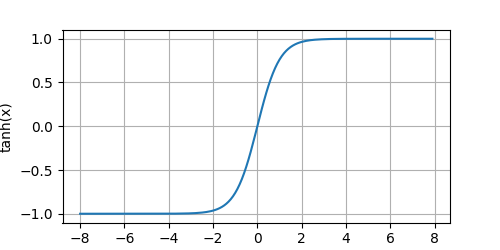
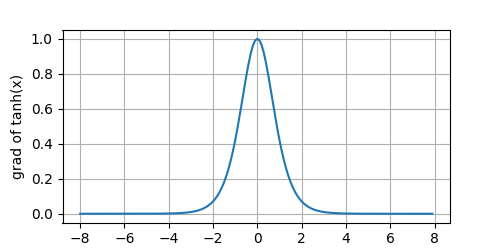
tanh函数:
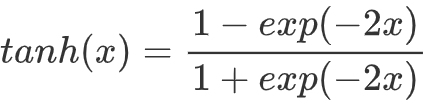
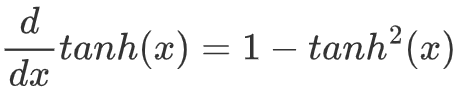
函数及其导数图像:
4.2 多层感知机的从零开始实现
base:
1
2
3
4
5
6
import torch
from torch import nn
from d2l import torch as d2l
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
初始化模型参数:
1
2
3
4
5
6
7
8
9
10
11
12
num_inputs, num_outputs, num_hiddens = 784, 10, 256
w1 = nn.Parameter(
torch.randn(num_inputs, num_hiddens, requires_grad=True) * 0.01
)
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True))
w2 = nn.Parameter(
torch.randn(num_hiddens, num_outputs, requires_grad=True) * 0.01
)
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True))
params = [w1, b1, w2, b2]
激活函数:
1
2
3
def relu(X):
a = torch.zeros_like(X)
return torch.max(X, a)
模型:
1
2
3
4
5
6
7
def net(X):
X = X.reshape((-1, num_inputs))
H = relu(X @ w1 + b1)
return (H @ w2 + b2) # @表示矩阵乘法
# 损失函数
loss = nn.CrossEntropyLoss(reduction='none')
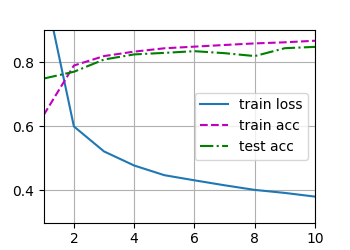
训练:
1
2
3
4
5
6
7
8
num_epochs, lr = 10, 0.1
updater = torch.optim.SGD(params, lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater)
d2l.plt.show()
d2l.predict_ch3(net, test_iter)
d2l.plt.figure(figsize=(10,6)) # 为了标签文本显示完整
d2l.plt.show()
结果:

4.3 多层感知机的简洁实现
模型:
1
2
3
4
net = nn.Sequential(nn.Flatten(),
nn.Linear(784, 256),
nn.ReLU(),
nn.Linear(256, 10))
1
2
3
4
5
def init_weights(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights)
训练:
1
2
3
4
5
6
7
batch_size, lr, num_epochs = 256, 0.1, 10
loss = nn.CrossEntropyLoss(reduction='none')
trainer = torch.optim.SGD(net.parameters(), lr=lr)
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
d2l.train_ch3(net,train_iter, test_iter, loss,num_epochs, trainer)
d2l.plt.show()
4.4 模型选择、欠拟合和过拟合
一些概念
- 过拟合:将模型在训练数据上拟合的比在潜在分布中更接近的现象
- 用于对抗过拟合的技术称为正则化
- 训练误差:模型在训练数据集上计算得到的误差
- 泛化误差:模型应用在同样从原始样本的分布中抽取的无限多数据样本时,模型误差的期望
- 独立同分布假设:假设训练数据和测试数据都是从相同的分布中独立提取得到
- K折交叉验证:原始训练数据被分为K个不重叠的子集,然后执行K次模型训练和验证,每次在K-1个子集上进行训练,并在剩余的一个子集(在该轮中没有用于训练的子集)上进行验证,最后通过对K次实验的结果取平均来估计训练和验证误差
几个倾向于影响模型泛化的因素:
- 可调整参数的数量。当可调整参数的数量(有时称为自由度)很大时,模型往往更容易过拟合。
- 参数采用的值。当权重的取值范围较大时,模型可能更容易过拟合。
- 训练样本的数量。即使模型很简单,也很容易过拟合只包含一两个样本的数据集。而过拟合一个有数百万个样本的数据集则需要一个极其灵活的模型。
区分欠拟合与过拟合:
欠拟合:训练误差和验证误差都很严重,但它们之间仅有一点差距,如果模型不能降低训练误差可能意味着模型过于简单;此外,由于训练和验证之间的泛化误差很小,有理由相信可以用一个更复杂的模型降低训练误差。
过拟合:训练误差明显低于验证误差
最好的预测模型在训练数据上的表现往往比验证数据上好得多,最终我们通常更关心验证误差,而不是训练误差和验证误差之间的差距。
使用实例

保存至d2l:
1
2
3
4
5
6
7
8
9
def evaluate_loss(net, data_iter, loss): # @save
"""评估给定数据集上模型的损失"""
metric = d2l.Accumulator(2) # 损失的总和,样本数量
for X, y in data_iter:
out = net(X)
y = y.reshape(out.shape)
l = loss(out, y)
metric.add(l.sum(), l.numel())
return metric[0] / metric[1]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
# 通常希望避免非常大的梯度值或损失值,因此除以阶乘
max_degree = 20 # 多项式的最大阶数
n_train, n_test = 100, 100 # 训练和测试数据集的大小
true_w = np.zeros(max_degree)
true_w[0:4] = np.array([5, 1.2, -3.4, 5.6])
features = np.random.normal(size=(n_train + n_test, 1))
np.random.shuffle(features)
poly_features = np.power(features, np.arange(max_degree).reshape(1, -1))
for i in range(max_degree):
poly_features[:, i] /= math.gamma(i + 1) # gamma(n) = (n - 1)!
labels = np.dot(poly_features, true_w)
labels += np.random.normal(scale=0.1, size=labels.shape)
# NumPy ndarray转换为tensor
true_w, features, poly_features, labels = [torch.tensor(x, dtype=
torch.float32) for x in [true_w, features, poly_features, labels]]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
def train(train_features, test_features, train_labels, test_labels,
num_epochs=400):
loss = nn.MSELoss(reduction='none')
input_shape = train_features.shape[-1]
# 不设置偏置,因为我们已经在多项式中实现了它
net = nn.Sequential(nn.Linear(input_shape, 1, bias=False))
batch_size = min(10, train_labels.shape[0])
train_iter = d2l.load_array((train_features, train_labels.reshape(-1, 1)),
batch_size)
test_iter = d2l.load_array((test_features, test_labels.reshape(-1, 1)),
batch_size, is_train=False)
trainer = torch.optim.SGD(net.parameters(), lr=0.01)
animator = d2l.Animator(xlabel='epoch', ylabel='loss', yscale='log',
xlim=[1, num_epochs], ylim=[1e-3, 1e2],
legend=['train', 'test'])
for epoch in range(num_epochs):
d2l.train_epoch_ch3(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss),
evaluate_loss(net, test_iter, loss)))
print('weight:', net[0].weight.data.numpy())
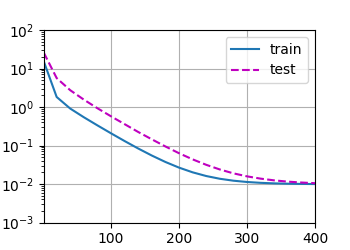
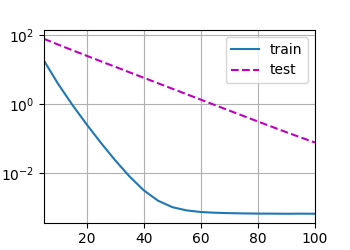
绘图:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
# 从多项式特征中选择前4个维度,即1,x,x^2/2!,x^3/3!,正常
train(poly_features[:n_train, :4], poly_features[n_train:, :4],
labels[:n_train], labels[n_train:])
d2l.plt.show()
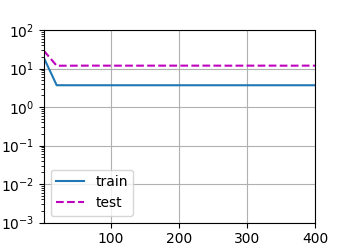
# 从多项式特征中选择前2个维度,即1和x,欠拟合
train(poly_features[:n_train, :2], poly_features[n_train:, :2],
labels[:n_train], labels[n_train:])
d2l.plt.show()
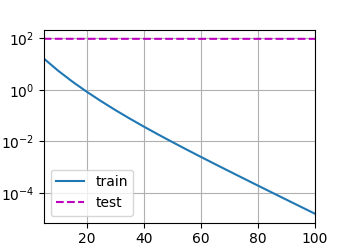
# 从多项式特征中选取所有维度,过拟合
train(poly_features[:n_train, :], poly_features[n_train:, :],
labels[:n_train], labels[n_train:], num_epochs=1500)
d2l.plt.show()
1
<img src="https://hhhi21g.github.io/assets/img/deepLearning/pic443.png" alt="alt text" style="zoom:75%;" />
</p>
4.5 权重衰减
最广泛使用的正则化的技术之一,它通常也被称为L2正则化;这项技术通过函数与0的距离来衡量函数的复杂度。
正则化是处理过拟合的常用方法:在训练集的损失函数中加入惩罚项,以降低学习到的模型的复杂度
线性回归的损失:
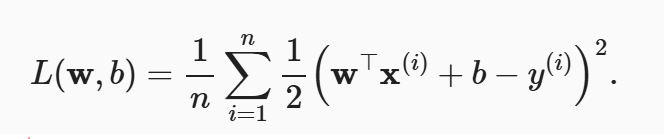
为了惩罚权重向量的大小,必须以某种方式在损失函数中添加||w||2, 通过正则化常数λ来描述这种权衡,这是一个非负超参数,使用验证数据拟合:
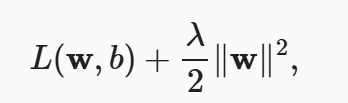
L2正则化回归的小批量随机梯度下降更新如下式:

使用L2而不是L1:
L2范数对权重向量的大分量施加了巨大的惩罚,这使得我们的学习算法偏向于在大量特征上均匀分布权重的模型;在实践中,这可能使它们对单个变量中的观测误差更加稳定。相比之下,L1惩罚会导致模型将权重集中在一小部分特征上,而将其他权重清除为0,这成为特征选择。
从零开始实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
import torch
from torch import nn
from d2l import torch as d2l
n_train,n_test,num_inputs,batch_size = 20,100,200,5
true_w,true_b = torch.ones((num_inputs,1))*0.01,0.05
train_data = d2l.synthetic_data(true_w,true_b,n_train)
train_iter = d2l.load_array(train_data,batch_size)
test_data = d2l.synthetic_data(true_w,true_b,n_test)
test_iter = d2l.load_array(test_data,batch_size,is_train=False)
# 从零开始实现权重衰退
# 随机初始化模型参数
def init_params():
w = torch.normal(0,1,size=(num_inputs,1),requires_grad=True)
b = torch.zeros(1,requires_grad=True)
return [w,b]
# 定义L2范数惩罚
def l2_penalty(w):
return torch.sum(w.pow(2))/2
def train(lambd):
w,b = init_params()
net,loss = lambda X:d2l.linreg(X,w,b),d2l.squared_loss
num_epochs,lr = 100,0.003
animator = d2l.Animator(xlabel='epochs',ylabel='loss',yscale='log',
xlim=[5,num_epochs],legend=['train','test'])
for epoch in range(num_epochs):
for X,y in train_iter:
l = loss(net(X),y)+lambd*l2_penalty(w)
l.sum().backward()
d2l.sgd([w,b],lr,batch_size)
if(epoch+1)%5==0:
animator.add(epoch+1,(d2l.evaluate_loss(net,train_iter,loss),
(d2l.evaluate_loss(net,test_iter,loss))))
print("w的L2范数是:",torch.norm(w).item());
train(lambd = 0)
train(lambd = 3)
d2l.plt.show()
结果:
这里训练误差增大,但测试误差减小,正是期望从正则化中得到的效果。
简洁实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
def train_concise(wd):
net = nn.Sequential(nn.Linear(num_inputs,1))
for param in net.parameters():
param.data.normal_()
loss = nn.MSELoss(reduction='none')
num_epochs,lr = 100,0.003
# 偏置参数没有衰减
trainer = torch.optim.SGD([
{"params":net[0].weight,'weight_decay':wd},
{"params":net[0].bias}
], lr = lr)
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
for epoch in range(num_epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.mean().backward()
trainer.step()
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1,
(d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数:', net[0].weight.norm().item())
train_concise(0)
train_concise(3)
d2l.plt.show()
4.6 暂退法(Dropout)
在训练过程中,建议在计算后续层之前向网络的每一层注入噪声。因为当训练一个有多层的深层网络时,注入噪声只会在输入-输出映射上增强平滑性。这个想法被称为暂退法。
从表面上看是在训练过程中丢弃一些神经元。在整个训练过程的每一次迭代中,标准暂退法包括在计算下一层之前将当前层的一些节点置零。
每个中间活性值h以暂退概率p由随机变量h’替换:
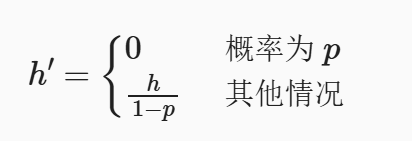
根据此模型的设计,其期望值保持不变,即E[h’] = h。
从零开始实现
单层的暂退法函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
def dropout_layer(X, dropout):
assert 0 <= dropout <= 1
# 所有元素都被丢弃
if dropout == 1:
return torch.zeros_like(X)
# 所有元素都被保留
if dropout == 0:
return X
mask = (torch.rand(X.shape) > dropout).float()
return mask * X / (1.0 - dropout)
X = torch.arange(16, dtype=torch.float32).reshape((2, 8))
print(X)
print(dropout_layer(X, 0.))
print(dropout_layer(X, 0.5))
print(dropout_layer(X, 1.))
tensor([[ 0., 1., 2., 3., 4., 5., 6., 7.], [ 8., 9., 10., 11., 12., 13., 14., 15.]])
tensor([[ 0., 1., 2., 3., 4., 5., 6., 7.], [ 8., 9., 10., 11., 12., 13., 14., 15.]])
tensor([[ 0., 0., 4., 0., 8., 0., 12., 0.], [ 0., 0., 20., 22., 24., 0., 0., 30.]])
tensor([[0., 0., 0., 0., 0., 0., 0., 0.], [0., 0., 0., 0., 0., 0., 0., 0.]])
定义模型:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
num_inputs, num_outputs, num_hiddens1, num_hiddens2 = 784, 10, 256, 256
# 常见技巧为:靠近输入层的地方设置较低的暂退概率
dropout1, dropout2 = 0.2, 0.5
class Net(nn.Module):
def __init__(self, num_inputs, num_outputs, num_hiddens1, num_hiddens2,
is_training=True):
super(Net, self).__init__()
self.num_inputs = num_inputs
self.training = is_training
self.lin1 = nn.Linear(num_inputs, num_hiddens1)
self.lin2 = nn.Linear(num_hiddens1, num_hiddens2)
self.lin3 = nn.Linear(num_hiddens2, num_outputs)
self.relu = nn.ReLU()
def forward(self, X):
H1 = self.relu(self.lin1(X.reshape(-1, self.num_inputs)))
# 只有在训练模型时才使用dropout
if self.training == True:
# 在第一个全连接层之后添加一个dropout层
H1 = dropout_layer(H1, dropout1)
H2 = self.relu(self.lin2(H1))
if self.training == True:
H2 = dropout_layer(H2, dropout2)
out = self.lin3(H2)
return out
net = Net(num_inputs, num_outputs, num_hiddens1, num_hiddens2)
训练和测试:
1
2
3
4
5
6
num_epochs, lr, batch_size = 10, 0.5, 256
loss = nn.CrossEntropyLoss(reduction='none')
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
d2l.plt.show()
简洁实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
net = nn.Sequential(nn.Flatten(),
nn.Linear(784,256),
nn.ReLU(),
nn.Dropout(dropout1),
nn.Linear(256,256),
nn.ReLU(),
nn.Dropout(dropout2),
nn.Linear(256,10))
def init_weights(m):
if type(m) == nn.Linear():
nn.init.normal_(m.weight,std=0.01)
net.apply(init_weights)
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
d2l.plt.show()
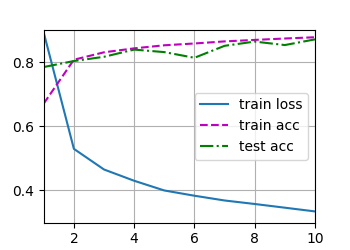
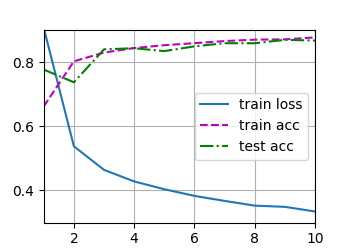
上为从零开始,下为简洁实现